
尽管不同类型的PID控制器,其结构、原理各不相同,但是基本控制规律只有三个:比例(P)控制、积分(I)控制和微分(D)控制。这几种控制规律可以单独使用,但是更多场合是组合使用。
如比例(P)控制、比例-积分(PI)控制、比例-积分-微分(PID)控制等。
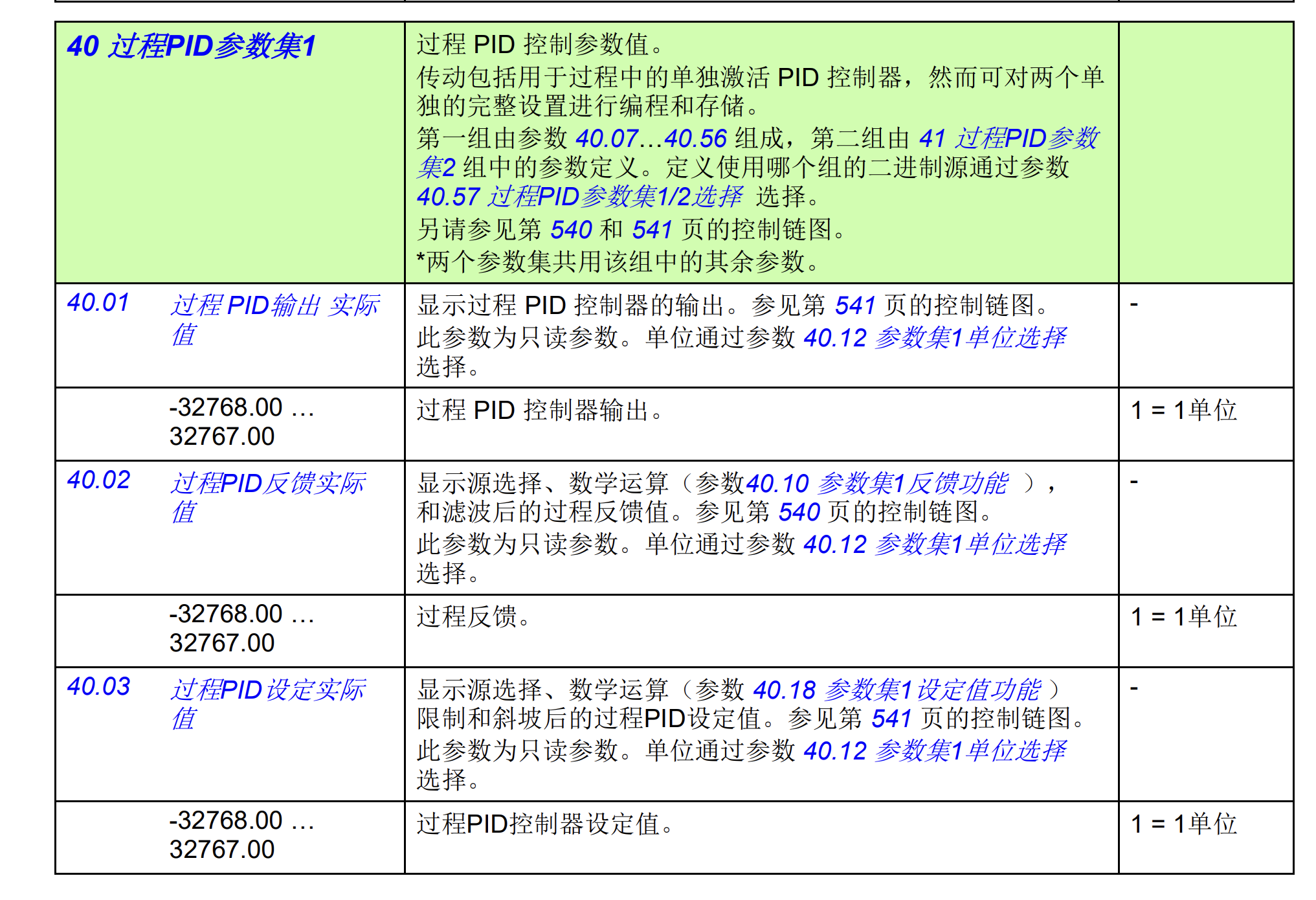
单独的比例控制也称“有差控制”,输出的变化(也即变频器参数中的过程PID输出实际值)与输入控制器(也即过程PID反馈实际值)的偏差成比例关系,偏差越大输出越大。
实际应用中,比例度(在一些变频器中也称为“增益”)的大小应视具体情况而定,比例度太小,控制作用太弱,不利于系统克服扰动,余差太大,控制质量差,也就是没有什么控制作用,响应速度太慢;比例度太大,控制作用太强,容易导致系统的稳定性变差,引发振荡。
对于反应灵敏、放大能力强的被控对象,为提高系统的稳定性,应当使比例度稍小些;而对于反应迟钝,放大能力又较弱的被控对象,比例度可选大一些,以提高整个系统的灵敏度,也可以相应减小余差。
对于供水系统,PID设置的经验为:如果在多台泵并联运行的情况下,只有1台泵执行PID过程控制变频调速,而且供水的片区较大的话, 比例(增益)应设置的稍微大一些,比如3台泵并联运行的工况较多,可以将增益设为3~5,然后再通过实际运行观察PID过程控制的响应速度和稳定性,以及是否出现震荡,再稍微修改一下比例(增益)。反之,则可以将比例(增益)设置的比较小一点,比如1~2。
单纯的比例控制适用于扰动不大,滞后较小,负荷变化小,要求不高,允许有一定余差存在的场合。工业生产中比例控制规律使用较为普遍。
对于一般的控制系统,应优先设置比例(增益),当比例(增益)设置到比较好的参数之后,再设置积分和微分进行精细优化。对于供水系统而言,往往由于用户的用水量变化很大,积分和微分控制的意义不大。
比例控制规律是基本控制规律中最基本的、应用最普遍的一种,其最大优点就是控制及时、迅速。只要有偏差产生,控制器立即产生控制作用。但是,不能最终消除余差的缺点限制了它的单独使用。克服余差的办法是在比例控制的基础上加上积分控制作用。
积分控制器的输出与输入偏差对时间的积分成正比。这里的“积分”指的是“积累”的意思。积分控制器的输出不仅与输入偏差的大小有关,而且还与偏差存在的时间有关。只要偏差存在,输出就会不断累积(输出值越来越大或越来越小),一直到偏差为零,累积才会停止。所以,积分控制可以消除余差。积分控制规律又称无差控制规律。
积分时间的大小表征了积分控制作用的强弱。积分时间越小,控制作用越强;反之,控制作用越弱。
积分控制虽然能消除余差,但它存在着控制不及时的缺点。因为积分输出的累积是渐进的,其产生的控制作用总是落后于偏差的变化,不能及时有效地克服干扰的影响,难以使控制系统稳定下来。所以,实用中一般不单独使用积分控制,而是和比例控制作用结合起来,构成比例积分控制。这样取二者之长,互相弥补,既有比例控制作用的迅速及时,又有积分控制作用消除余差的能力。因此,比例积分控制可以实现较为理想的过程控制。
比例积分控制器是目前应用最为广泛的一种控制器,多用于工业生产中液位、压力、流量等控制系统。由于引入积分作用能消除余差,弥补了纯比例控制的缺陷,获得较好的控制质量。但是积分作用的引入,会使系统稳定性变差。对于有较大惯性滞后的控制系统,要尽量避免使用。
比例积分控制对于时间滞后的被控对象使用不够理想。所谓“时间滞后”指的是:当被控对象受到扰动作用后,被控变量没有立即发生变化,而是有一个时间上的延迟,比如容量滞后,此时比例积分控制显得迟钝、不及时。为此,人们设想:能否根据偏差的变化趋势来做出相应的控制动作呢?犹如有经验的操作人员,即可根据偏差的大小来改变阀门的开度(比例作用),又可根据偏差变化的速度大小来预计将要出现的情况,提前进行过量控制,“防患于未然”。这就是具有“超前”控制作用的微分控制规律。微分控制器输出的大小取决于输入偏差变化的速度。
微分输出只与偏差的变化速度有关,而与偏差的大小以及偏差是否存在与否无关。如果偏差为一固定值,不管多大,只要不变化,则输出的变化一定为零,控制器没有任何控制作用。微分时间越大,微分输出维持的时间就越长,因此微分作用越强;反之则越弱。当微分时间为0时,就没有微分控制作用了。同理,微分时间的选取,也是需要根据实际情况来确定的。
微分控制作用的特点是:动作迅速,具有超前调节功能,可有效改善被控对象有较大时间滞后的控制品质;但是它不能消除余差,尤其是对于恒定偏差输入时,根本就没有控制作用。因此,不能单独使用微分控制规律。
比例和微分作用结合,比单纯的比例作用更快。尤其是对容量滞后大的对象,可以减小动偏差的幅度,节省控制时间,显著改善控制质量。
最为理想的控制当属比例-积分-微分控制规律,也即为完整的PID控制。它集三者之长:既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。

比例系数P的调节范围一般是:0.1--100.
如果增益值取 0.1,PID 调节器输出变化为十分之一的偏差值。如果增益值取 100, PID 调节器输出变化为一百倍的偏差值。
可见该值越大,比例产生的增益作用越大。初调时,选小一些,然后慢慢调大,直到系统波动足够小时,再该调节积分或微分系数。过大的P值会导致系统不稳定,持续振荡;过小的P值又会使系统反应迟钝。合适的值应该使系统由足够的灵敏度但又不会反应过于灵敏,一定时间的迟缓要靠积分时间来调节。
积分时间常数的定义是,偏差引起输出增长的时间。积分时间设为 1秒,则输出变化 100%所需时间为 1 秒。初调时要把积分时间设置长些,然后慢慢调小直到系统稳定为止。
微分值是偏差值的变化率。例如,如果输入偏差值线性变化,则在调节器输出侧叠加一个恒定的调节量。大部分控制系统不需要调节微分时间。因为只有时间滞后的系统才需要附加这个参数。如果画蛇添足加上这个参数反而会使系统的控制受到影响。如果通过比例、积分参数的调节还是收不到理想的控制要求,就可以调节微分时间。初调时把这个系数设小,然后慢慢调大,直到系统稳定。

 扫一扫,关注我们最新消息
扫一扫,关注我们最新消息 工作时间:周一至周五 8:00-18:00
联系人:王经理
手机:13542776119
邮件:kenflo.lw@qq.com
地址:惠州市大亚湾西区龙海二路32号景乐园商务大厦2栋803室



调试完成")


